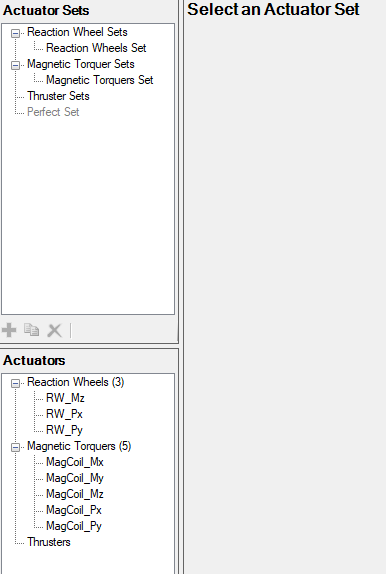
Actuators
Use the SOLIS Actuators page to define the following types of actuators:
While you can configure all three types of actuators at once, SOLIS only supports a single type of actuator each for attitude control and momentum desaturation. See Attitude Control System for more information on selecting actuator purposes.
Adding an actuator
There are two ways to add an actuator. For more detailed design, you can add an actuator by selecting the top level of the actuator you would like to include and clicking  . Then configure the actuator using the Spacecraft and ODySSy parameter tabs on the right side of the window. More information about the various parameters available for actuators is described below.
. Then configure the actuator using the Spacecraft and ODySSy parameter tabs on the right side of the window. More information about the various parameters available for actuators is described below.
For quick selection of an actuator package, use the Actuator Configuration Wizard by clicking  .
.
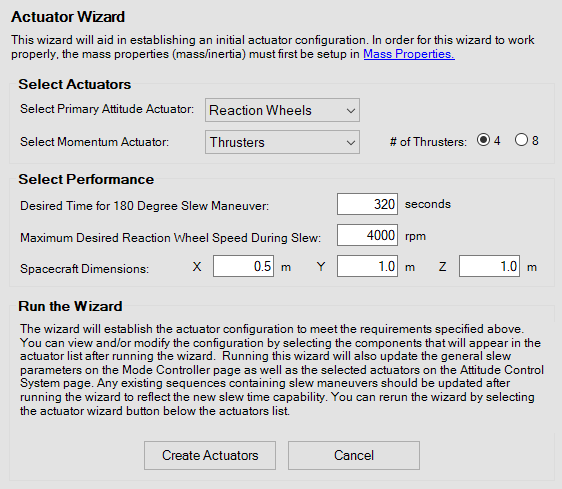
Actuator Configuration Wizard
The provided Actuator Wizard sizes the actuators based on the mass properties of the vehicle as well as the provided slew time. However, the wizard does not consider the capabilities needed for pointing mode track rates and accelerations. Therefore, actuator sizes chosen by the wizard may be inadequate for stressing tracking modes.
Actuator sets
SOLIS uses actuator sets to organize and control actuators. These actuator sets are used within the Attitude Control System for control on a per-axis basis. To create an actuator set, use the tree in the top left of the page. Select a type of set and press .
View a set's parameters and add or remove actuators to a set by clicking a set's name. If actuators of the set type already exist, they will be automatically included and enabled when a new set is created. Actuators added after the set is created will not be included or enabled automatically; this must be done by you.
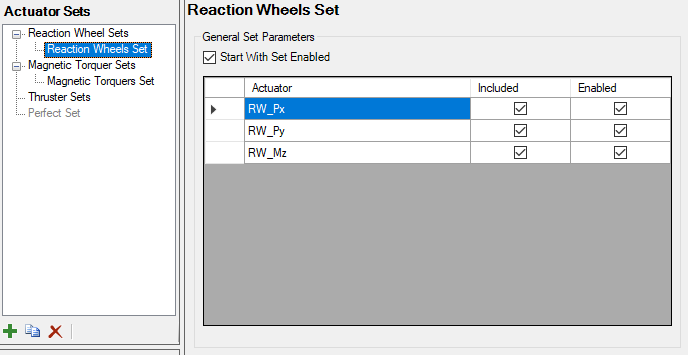
Although each set type has different associated parameters, they all contain the following general parameters:
| Actuator Set Parameters | Description |
|---|---|
| Start with Set Enabled | Set processor is enabled at initialization. A warning will occur if two sets start enabled and share enabled actuators. |
| Included | Includes the actuator in the actuator set. Included actuators contribute to set calculations regardless of their enabled status. |
| Enabled | Turns on the commanding and processing of an included actuator, which is useful for failure analysis. |
Reaction wheels
Reaction wheels utilize the conservation of angular momentum to exert a torque on the spacecraft, where
Torque = Wheel Inertia x Angular Acceleration
Reaction wheels are useful for providing:
- Control authority about all rotational axes when mounted in various orientations
- Fault tolerance when using more than three wheels
Each wheel is driven by a motor to provide angular acceleration. Eventually the resistance of the rotational friction and back EMF overcomes the driving motor torque, and the wheel becomes saturated. It is essential for spacecraft with reaction wheels to have momentum desaturation capabilities, often performed with magnetic torquers or thrusters. Otherwise, the spacecraft may lose control authority in one or more directions.
Reaction wheel set glossary
| Parameters | Description | Units |
|---|---|---|
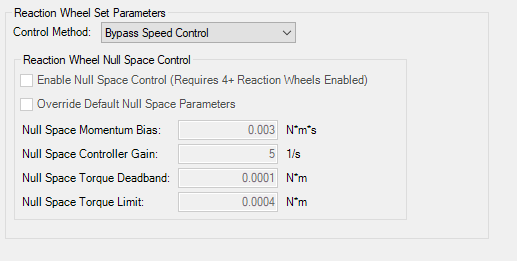
| Control Method | This is the initial wheel speed control state for the reaction wheel set; see the table below for details of each method. | N/A |
| Enable Null Space Control | Enables Reaction Wheel Null Space Control. This requires four or more reaction wheels to be enabled, as the additional wheels allow momentum and torque to be shifted among the wheels while keeping the net momentum and torque on the spacecraft the same. The null controller works to drive the reaction wheels toward the desired Null Space Momentum Bias. The Attitude Control System always has priority over the null controller when operating near the wheel limits. | N/A |
| Override Default Null Space Parameters | Overrides the SOLIS computed Default Null Space Parameters. This is only available if you select Enable Null Space Control. | N/A |
| Null Space Momentum Bias | This value applies to each wheel individually along the wheel spin axis. The momentum bias is what the wheels will be driven toward by the null controller, within the pointing commands and control limits of the system. Momentum biasing is useful for holding wheels away from zero speed, where stiction can be an issue. | N*m*s |
| Null Space Controller Gain | Gain applied to the null space controller commands | 1/s |
| Null Space Torque Deadband | Torque deadband applied to the null space controller commands | N/A |
| Null Space Torque Limit | Torque limit applied to the null space controller commands | N/A |
Control methods
| Control Method | Description |
|---|---|
| Bypass Speed Control | (Default) Bypasses speed controller and uses torque commands straight from the Attitude Control System instead. |
| Compensate Friction | Converts torque commands into speed commands, which allows the wheels to compensate better for friction. Some wheels already do this internally. This option can improve behavior if transients due to friction are large. |
| Goto Speed | Set wheels to go to a commanded speed. |
| Hold Speed | Set wheels to hold their current speed. |
| Speed External | Enables you to create a custom component via the Development Tool that can feed wheel speed commands from outside the Attitude Control System to the reaction wheel set. |
| Constant Torque | Commands a constant torque. |
Reaction wheel glossary
Spacecraft configuration
| Spacecraft Configuration Parameters | Description | Units |
|---|---|---|
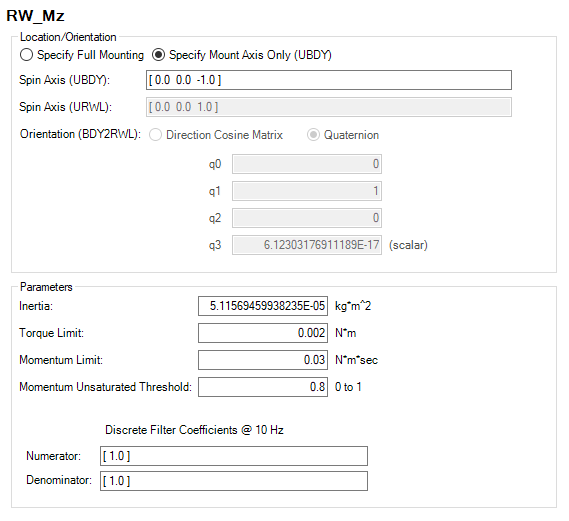
| Location/Orientation | Location and orientation of RWL on the spacecraft:
|
N/A |
| Spin Axes (URWL) | FSW-defined reaction wheel axis of rotation in the spacecraft frame | UVec |
| Orientation | Three-axis angular orientation of the RWL frame relative to the BDY frame, defined as a DCM or quaternion, only available if you select Specify Full Mounting | N/A |
| Inertia | Wheel inertia about spin axis The maximum wheel speed will be MomentumLimit/Inertia. |
kg*m2 |
| Torque Limit | Maximum commanded wheel torque on a specified wheel | N*m |
| Momentum Limit | Maximum allowed momentum on a specified wheel | N*m*s |
| Momentum Unsaturated Threshold | If a wheel speed exceeds the momentum limit, a torque command in the direction of saturation is zeroed until wheel speed < MomentumLimit * MomentumUnsaturatedThreshold. Commands in the direction away from saturated are not zeroed. |
0 to 1 |
| Discrete Filter | Discrete filter coefficients for processing the speed measurement of the reaction wheel | N/A |
ODySSy configuration
| ODySSy Simulation Parameters | Description | Units |
|---|---|---|
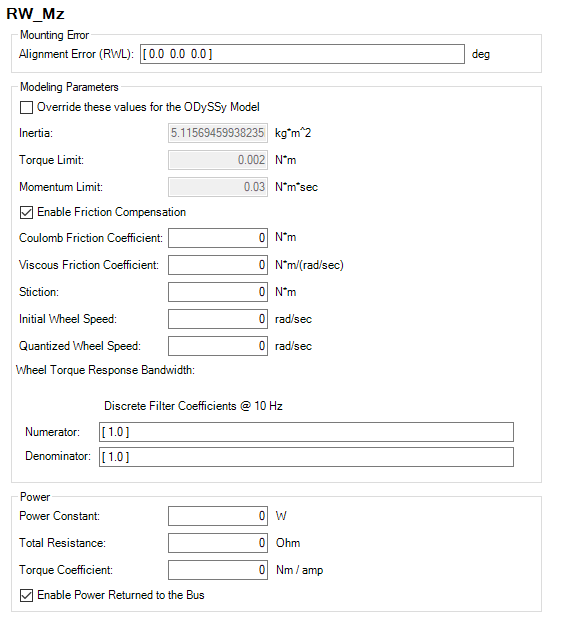
| Alignment Error (RWL) | Small angle rotation errors in the RWL frame | deg |
| Override these values for the ODySSy Model | Simulates a true wheel that differs from the spacecraft parameters. | N/A |
| Inertia | True wheel inertia about spin axis | kg*m2 |
| Torque Limit | True maximum torque capability of the specified wheel | N*m |
| Momentum Limit | True maximum momentum capability of the specified wheel | N*m*s |
| Enable Friction Compensation | Enables/disables consideration for torques from known Coulomb and Viscous frictions (does not account for Stiction)
|
N/A |
| Coulomb Friction Coefficient | Baseline friction torque, sometimes called the static friction | N*m |
| Viscous Friction Coefficient | Friction torque proportional to angular velocity | N*m/rad/s |
| Stiction | Torque required to overcome static cohesion | N*m |
| Initial Wheel Speed | Angular velocity of the wheel at the beginning of simulation | rad/s |
| Quantized Wheel Speed | Measurement resolution of the wheel speed, entering "0" indicates no discretization of the true value | rad/s |
| Wheel Torque Response Bandwidth / Discrete Filter Coefficients | Discrete filter coefficients for simulating the bandwidth response of the wheel | N/A |
| Power Constant | Baseline power to run the wheel, sometimes associated with the drive electronics | W |
| Total Resistance | Total resistance of the driver and motor | Ohm |
| Torque Coefficient | Measure of efficiency defining the amount of current required to produce a torque | N*m/amp |
| Enable Power Returned to the Bus | Reaction wheels are essentially energy storage devices. When torquing in the opposing direction of the current wheel speed, the wheel can be used to produce power. When you select this check box, reaction wheels to add power to the bus. | N/A |
Magnetic torquers
Magnetic torquers utilize electromagnetic coils to interact with an ambient magnetic field (usually Earth's) to exert a torque on the spacecraft. This effect allows the system to reduce the momentum state of the spacecraft or reaction wheels by exerting a small torque on the spacecraft. This force is compensated for by the attitude controller. Using these principles, the reaction wheels can be kept below their saturation points and the overall spacecraft momentum can be controlled.
The strength of the torque exerted by the magnetic torquers is related to:
- Strength of each magnetic field
- Orientation of those fields
- Orientation and strength of the ambient magnetic field
In order to calculate magnetic torquer commands, knowledge of the strength and direction of the ambient magnetic field is required. This is often done by measuring the ambient magnetic field with a Magnetometer, or simply by using a magnetic field model. If a magnetic field model is used, orbit position and spacecraft attitude must both be known.
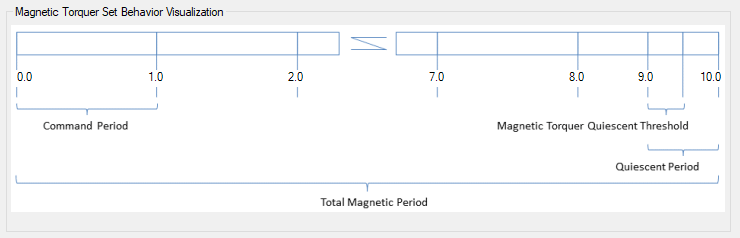
The diagram below details the Total Magnetic Period consisting of multiple Command Periods where the current to the torquers is either on or off. At the end of each Total Magnetic Period, there is a designated Quiescent Period where the torquers are always off. If at any time the torquers have been off for longer than the Magnetic Torquer Quiescent Threshold, the magnetometer measurements are labeled as valid.
Magnetic torquer set glossary
| Parameter/Control | Description | Units |
|---|---|---|
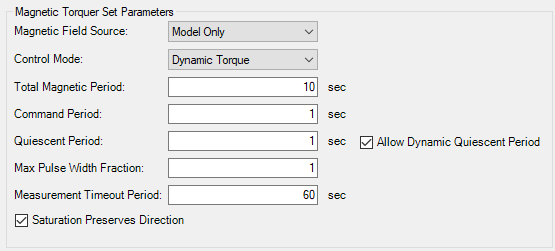
| Magnetic Field Source | There are three options for the Magnetic Field Source:
|
N/A |
| Control Mode | Dynamic commanding via controller or constant commands. Constant command comes from the Constant Pulse Width Command in an individual magnetic torquer parameters. | N/A |
| Total Magnetic Period | Duration of full magnetic torquing cycle; the cycle repeats continuously | s |
| Command Period | Frequency to update pulse width command within the magnetic cycle For example, in a 10Hz system, if the pulse width command is 22% and the Command Period is 2 sec, the torque rods will be fully on for four frames and 40% on for the fifth frame. The torque rod will then be off for the remaining 15 frames. In this same example, if the Command Period was 1 second, the torque rod would be fully on for two frames and 20% on for the third frame. The torque rod would then be off for the remaining seven frames. A new command would be computed on the eleventh frame. |
s |
| Quiescent Period | Time of quiescence at end of the magnetic cycle | s |
| Allow Dynamic Quiescent Period | Defaults to True. Allows magnetometer measurements to occur during times where the mag torquer duty cycle is off, in addition to the specified Quiescent Period.
|
N/A |
| Max Pulse Width Fraction | Maximum pulse width for each torquer as a fraction of the Command Period | N/A |
| Measurement Timeout Period | Time since last measurement to consider valid | s |
| Saturation Preserves Direction | Enables/disables preservation of torque direction.
|
N/A |
Magnetic torquer glossary
Spacecraft configuration
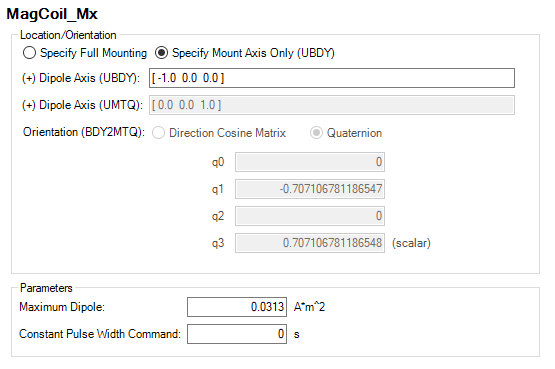
| Spacecraft Configuration Parameters | Description | Units |
|---|---|---|
| Location/Orientation | Location and Orientation of MT on SC
|
N/A |
| Dipole Axes (UMTQ) | Vector that defines the direction of the positive dipole of the magnetic torquer | UVec |
| Orientation | Three-axis angular orientation of the magnetic torquer frame defined as a DCM or quaternion, only available if Specify Full Mounting is selected | N/A |
| Maximum Dipole | Strength of the magnetic dipole under nominal voltage input | A*m2 |
| Constant Pulse Width Command | Constant command if in constant command mode | s |
ODySSy Configuration
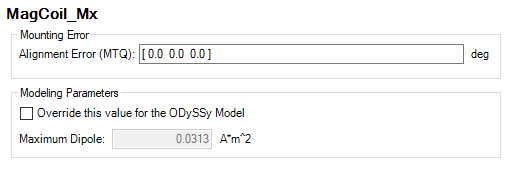
| ODySSy Simulation Parameters | Description | Units |
|---|---|---|
| Alignment Error (MTQ) | Small angle rotation errors in the MTQ frame | deg |
| Maximum Dipole | Strength of the magnetic dipole under nominal voltage input | A*m2 |
Thrusters
Thrusters are unique to the other actuators in that they can perform attitude control, momentum desaturation, and translational burns. They operate independently of external magnetic fields, which make them a common choice for spacecraft outside of LEO. However, their fuel source is finite, which can lead to mission life span issues.
Thruster Set Glossary
General Parameters
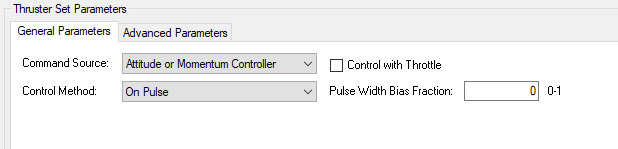
Visit the Thruster Processing and Thruster pages for more detailed descriptions and diagrams about the set's behavior. The default values should work well for attitude and momentum control use cases.
| Parameter | Description | Units |
|---|---|---|
| Command Source | Initial thruster set control state:
|
N/A |
| Control with Throttle | If true, thruster is throttled instead of using pulse width modulation. | N/A |
| Control Method | Pulse width control method
|
N/A |
| Pulse Width Bias Fraction | The base pulse width command from which on pulsing, off pulsing, or differential pulsing is computed (attitude control only). | 0-1 |
| SC Center of Mass (BDY) | Current Center of Mass (CM) location of SC in BDY frame. May differ from actual CM if CM changes. | m |
Advanced Parameters
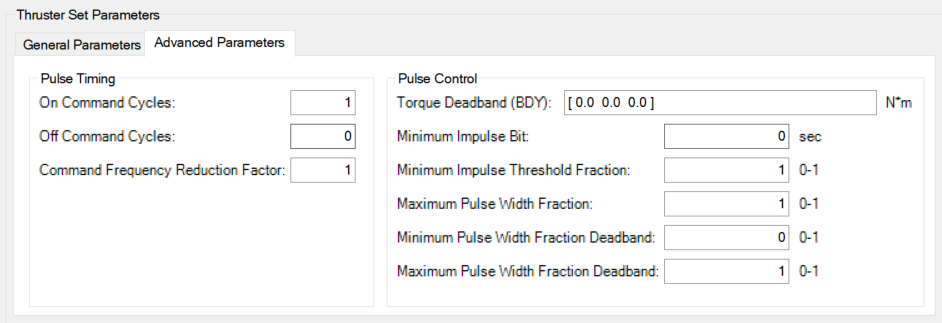
| Parameter | Description | Control Mode | Units |
|---|---|---|---|
| On Command Cycles | Number of consecutive cycles where non-zero attitude control torque command is allowed. | Attitude | N/A |
| Off Command Cycles | Number of consecutive cycles where zero attitude control torque command is forced after "On" command cycles complete. | Attitude | N/A |
| Command Frequency Reduction Factor | Factor to reduce attitude control commanding frequency. For example, a value of 2 updates the command every other cycle. | Attitude | N/A |
| Torque Deadband (BDY) | Minimum torque command required to execute command (per axis). | Attitude | N*m |
| Minimum Impulse Bit | Minimum pulse width required to issue command. | Attitude or Manual | s |
| Minimum Impulse Threshold Fraction | Fraction of minimum impulse that will still issue a command the size of the minimum impulse | Attitude | 0-1 |
| Maximum Pulse Width Fraction | Maximum pulse width the logic is allowed to compute. | Attitude | 0-1 |
| Minimum Pulse Width Fraction Deadband | Point below which the pulse width is rounded down to zero. | Attitude | 0-1 |
| Maximum Pulse Width Fraction Deadband | Point above which the pulse width is rounded up to D_MaxPWFraction. |
Attitude | 0-1 |
Thruster Glossary
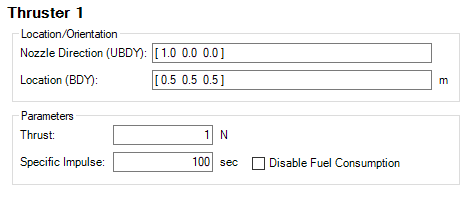
Spacecraft configuration
Visit the Thruster Processing and Thruster) pages for more detailed descriptions and diagrams about the set's behavior. The default values should work well for attitude and momentum control use cases.
| Spacecraft Configuration Parameters | Description | Units |
|---|---|---|
| Nozzle Direction (UBDY) | Unit vector defining direction of the thruster | UVec |
| Location (BDY) | Location of specified thruster in the BDY frame | m |
| Thrust | Maximum thrust magnitude | N |
| Specific Impulse | Change in linear momentum per mass unit of fuel | s |
| Disable Fuel Consumption | Specific Impulse = 0; no fuel will be depleted when the thruster fires |
N/A |
ODySSy configuration
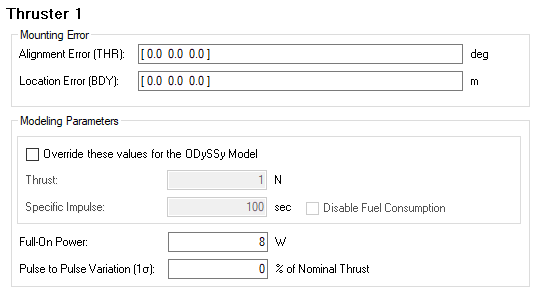
| ODySSy Simulation Parameters | Description | Units |
|---|---|---|
| Alignment Error (THR) | Small angle rotations defined in the thruster (THR) frame (relative to thruster boresight) | m |
| Location Error (BDY) | Location error of the thruster in the BDY frame | m |
| Override these values for the ODySSy Model | Enables/disables modifying true thruster performance | N/A |
| Thrust | True thrust output of a specified thruster | N |
| Specific Impulse | True thruster efficiency, change in linear momentum per mass unit of fuel | s |
| Pulse to Pulse Variation | True variation in actual thrust magnitude per pulse as a percentage of nominal thrust, delta from nominal | % of Nominal Thrust |